
Designed for rehabilitation of adults between 1.50 – 1.95 m in height, with a max. body weight of 100 kg • Used for gait compensation in patients who have paralysis of the lower limbs following spinal cord injuries. HANK by GOGOA is the premiere lower body rehabilitation exoskeleton designed in the European Union. This exoskeleton features a hip-knee-ankle actuation scheme. It is designed primarily for gait rehabilitation but there is also a version for personal use called Robotic Neuro-Rehabilitation and Robotic Neuro-Mobility respectively.
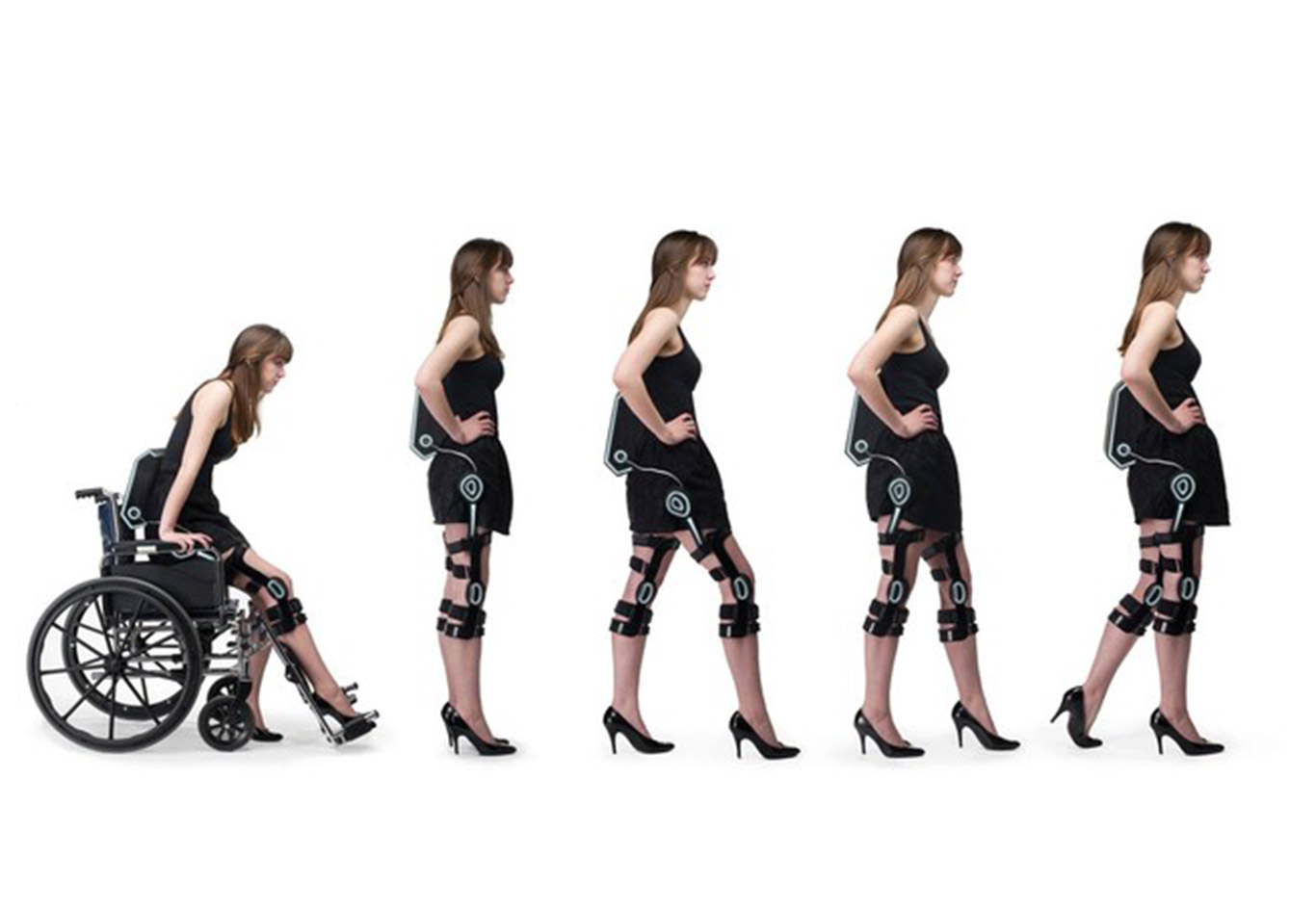
DESCRIPTION: HANK is a lower limb gait training exoskeleton with actuation to the hip, knee, and ankle in the same plane of movement. Designed for:
Adults 1.5 meters to 1.95 meters in height
Maximum body weight of 100kg
To be used for stroke and neurological conditions patients
Paralysis due to spinal cord injury
Specifications:
Made using lightweight aluminum 7075
Mechanically limited range of motion for safety
Reportedly, the HANK is undergoing a new revision that will feature a lightweight but visually appealing external casing. The HANK is a unique exoskeleton that uses design input from the West and East. It shares commonality with American and Japanese rehabilitation exoskeletons.
Knee rehabilitation exoskeleton • Knee moment restoring • Assists as needed predefined moment parons. The BELK Knee Exoskeleton is a powered knee wearable robot for knee extension. It is designed for knee rehabilitation, with a focus on restoring movement. Similar to the HANK, its single motor can be run in assist-as-needed mode or in a predefined movement regime. The BELK also shares the same input/output capabilities as the larger HANK. There is also the possibility to customize the exo orthotics and the cover textiles.

The Belk is a knee exoskeleton oriented to the recovery of knee lesions, traumatic, postoperation and also to help stroke patients in their recovery process, it will include a combined electrostimulation coordinated with the movement. wearable robotic device that can be used for knee rehabilitation, in the sub-acute phase of knee injuries. It incorporates “assisted-as-needed” control and Functional Electrical Stimulation (FES) features, helping to speed-up and to improve the rehabilitation process. Assisted-as-needed control allows creating a force field along the desired trajectory, proportionally applying torque only when the patient deviates from the pre-programmed correct pattern. This force field control, by assisting only the segments that the patient need, produces a natural gait pattern, improving the rehabilitation process.” kneee
